Chliveros G., Pateraki M., Trahanias P., 2013. Robust multi-hypothesis 3D object pose tracking. In Proc. of the 9th Intl. Conference on Computer Vision Systems (ICVS), LNCS 7963, pp. 234-243, Springer-Verlag, St. Petersburg, Russia, July 16-18, 2013. [doi] [pdf] [bib]
Abstract:
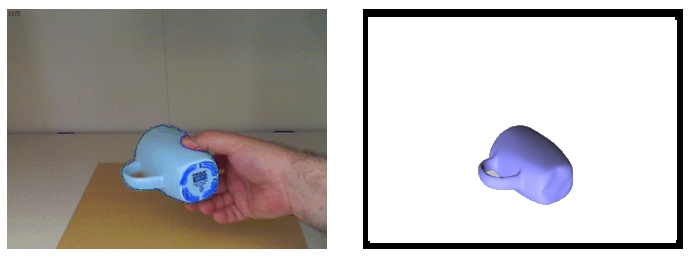
This paper tackles the problem of 3D object pose tracking from monocular cameras. Data association is performed via a variant of the Iterative Closest Point algorithm, thus making it robust to noise and other artifacts. We re-initialise the hypothesis space based on the resulting re-projection error between hypothesized models and observed image objects. This is performed through a non-linear minimisation step after correspondences are found. The use of multi-hypotheses and correspondences refinement, lead to a robust framework. Experimental results with benchmark image sequences indicate the effectiveness of our framework.
 |