Chliveros G., Figueiredo R.P., Moreno P., Pateraki M., Bernardino A., Santos-Victor, J. and Trahanias P., 2014. A framework for 3D object identification and tracking. In Proc. of the 9th International Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISAPP2014), 5-7 January, Lisbon, Portugal. [doi] [pdf] [bib]
Abstract:
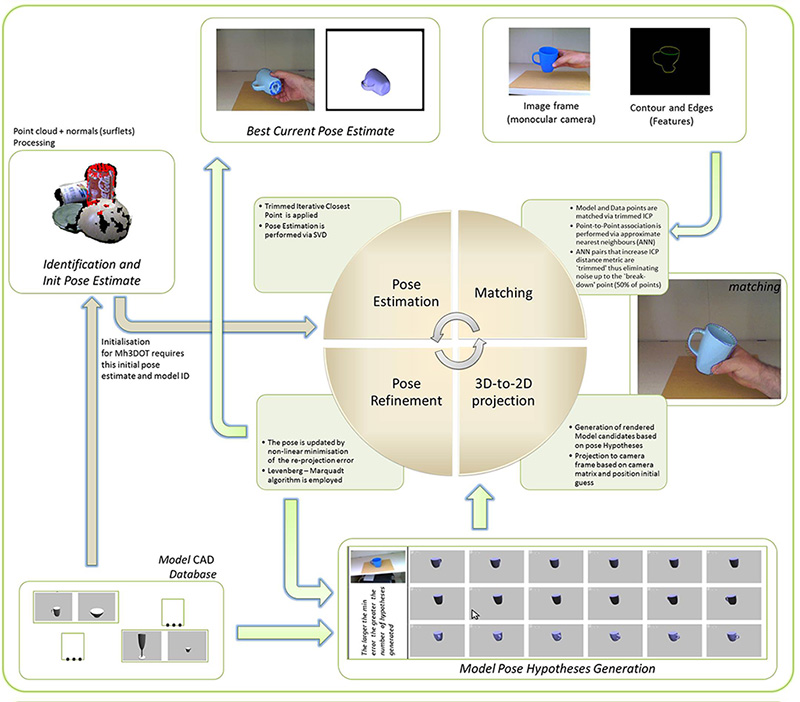
In this paper we present a framework for the estimation of the pose of an object in 3D space: from the detection and subsequent recognition from a 3D point-cloud, to tracking in the 2D camera plane. The detection process proposes a way to remove redundant features, which leads to significant computational savings without affecting identification performance. The tracking process introduces a method that is less sensitive to outliers and is able to perform in soft real-time. We present preliminary results that illustrate the effectiveness of the approach both in terms of accuracy and computational speed.
 |